三角形绘制
在上一篇文章中,我们已经实现了点绘制的功能。基于点绘制的功能,我们使用 Bresenham 画线算法,实现了画线功能。
这篇文章中,我们实现三角形绘制的功能。分为两大部分讲解:第一部分介绍并实现向量运算;第二部分基于实现的向量运算,完成三角形绘制功能。
1. 向量运算
向量上的运算包括向量的加法、减法、标量乘法等,这些就不做介绍了。此处说明一下点积和叉积,这两个概念在向量运算相关的书籍上,也都是老生常谈的篇幅了。但是自己接触下来还是很陌生,所以这边以我自己提问题的形式,对相关概念进行说明。
Q1: 几何公式和向量公式的等价
如图 1 所示,说明叉积的公式推导。主要就是用到三角函数的和差公式。
\(\vec{A}\times\vec{B}=\lvert \vec{A} \rvert \lvert \vec{B} \rvert \text{sin}(\theta)=\lvert \vec{A} \rvert \lvert \vec{B} \rvert \text{sin}(\alpha - \beta) \)
\(=\lvert \vec{A} \rvert \lvert \vec{B} \rvert \{\text{sin}(\alpha)\text{cos}(\beta)-\text{cos}(\alpha)\text{sin}(\beta)\} \)
\(=\lvert \vec{A} \rvert \text{sin}(\alpha) \lvert \vec{B} \rvert \text{cos}(\beta) - \lvert \vec{A} \rvert \text{cos}(\alpha) \lvert \vec{B} \rvert \text{sin}(\beta) \)
\(=B_x A_y - B_y A_x\)
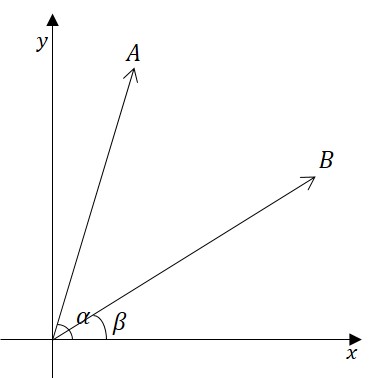
在上面式子中,可以发现结果和向量公式的结果是相反数。如果在图中交换向量 \(A\) 和 \(B\) 的位置,就能和向量公式一样。一样的思路推导,可以发现点积结果是无关顺序的。这是叉积有方向的一个直观体现。
叉积是矢量。可以从和差公式中感受出来。
叉积对应 sin,点积对应 cos。看着还是非常和谐的。
Q2: 叉积的方向和右手定则
叉积的方向垂直于两个向量所在的平面,这是三维上的概念。所以,我们先把二维的叉积统一梳理到三维上。
用行列式的概念,方便说明。三维叉积:
\(\begin{vmatrix} i & j & k \\ a_x & a_y & a_z \\ b_x & b_y & b_z \end{vmatrix}\)
二维的话 \(z\) 轴坐标为 0,展开的话,结果其实就是 \(z\) 轴上的分量:
\(\begin{vmatrix} i & j & k \\ a_x & a_y & 0 \\ b_x & b_y & 0 \end{vmatrix}=k\begin{vmatrix} a_x & a_y \\ b_x & b_y \end{vmatrix}\)
接着,我们顺便证明一下叉积是垂直于向量所在平面的。我们把叉积结果和各个向量做点积,看结果是否为 0。我们先看 \((a_x,a_y,a_z)\):
\(a_x \begin{vmatrix} a_y & a_z \\ b_y & b_z \end{vmatrix} + a_y \begin{vmatrix} a_x & a_z \\ b_x & b_z \end{vmatrix} + a_z \begin{vmatrix} a_x & a_y \\ b_x & b_y \end{vmatrix} \)
\(=\begin{vmatrix} a_x & a_y & a_z \\ a_x & a_y & a_z \\ b_x & b_y & b_z \end{vmatrix}=0\)
可以直接看成 \((a_x,a_y,a_z)\) 按行展开。行列式两行相同,结果为 0。同理另一个向量也是,所以叉积的方向垂直于两个向量所在的平面。
行列式两行相同,结果为 0:用行列式的全排列展开式子可以证明。
现在我们回到右手定则的讨论上。我们已知叉积都是垂直两个向量所在的平面,它“朝里”还是“朝外”是由 \(z\) 轴上分量决定的。
即 \(\begin{vmatrix} a_x & a_y \\ b_x & b_y \end{vmatrix}\) 的正负决定的。
看到 Q1 中的几何公式,要判断正负性,其实就是判断两个向量之间的角度。右手定则就是判断角度用的。
Q1 计算错误的原因是,叉积定义的角度其实是一个向量逆时针到另一个向量的角度。
右手定则中有个条件,要扫过最短的那条路径,其实就是在框定计算角度对应的正负号。
2. 向量运算代码实现
对应的实现,记录在 tag/vector_ops。
实现的思路是,如代码清单 2.1 所示,用模板定义一个向量的基类 Vector,在上面实现各种通用的操作:加法、减法、标量乘法、标量除法。
- template<typename T, size_t N>
- class Vector
- {
- protected:
- T elements[N];
- public:
- Vector()
- {
- }
- Vector(std::initializer_list<T> init)
- {
- assert(init.size() == N);
- size_t i = 0;
- for (auto& e : init)
- elements[i++] = e;
- }
- size_t size() const
- {
- return N;
- }
- Vector& operator=(const Vector& rhs)
- {
- if (this != &rhs)
- memcpy(elements, rhs.elements, N * sizeof(T));
- return *this;
- }
- T& operator[](size_t i)
- {
- assert(i < N);
- return elements[i];
- }
- const T& operator[](size_t i) const
- {
- assert(i < N);
- return elements[i];
- }
- Vector operator+(const Vector& rhs) const
- {
- Vector res;
- for (size_t i = 0; i < N; i++)
- res[i] = elements[i] + rhs.elements[i];
- return res;
- }
- // …… ……
- // …… ……
- }
初版 Vector 类是用 std::vector 实现内部存储的。debug 版本调试下来,逐帧频繁的构造开销有点大,所以改成数组方式了。
release 版本没有问题,应该是编译有优化。
对于二维向量,继承上述实现的 Vector 类。再在上面添加特定的函数,如代码清单 2.2 所示,我们通常会以 .x()、.y() 方式访问分量,命名更加直观。三维向量也是如此。
- template<typename T>
- class Vector2 : public Vector<T, 2>
- {
- public:
- Vector2()
- {
- }
- Vector2(T x, T y) : Vector<T, 2>({ x, y })
- {
- }
- T& x() { return Vector<T, 2>::elements[0]; }
- T& y() { return Vector<T, 2>::elements[1]; }
- const T& x() const { return Vector<T, 2>::elements[0]; }
- const T& y() const { return Vector<T, 2>::elements[1]; }
- };
对于点积和叉积,如代码清单 2.3 所示,写成全局函数的方式,调用的形式看着更加舒服。
- template<typename T, size_t N>
- T dot(const Vector<T, N>& a, const Vector<T, N>& b)
- {
- T sum = 0;
- for (size_t i = 0; i < a.size(); i++)
- sum += a[i] * b[i];
- return sum;
- }
- template<typename T>
- T cross(const Vector<T, 2>& a, const Vector<T, 2>& b)
- {
- return a[0] * b[1] - a[1] * b[0];
- }
3. 三角形绘制原理
前两节介绍了向量并且用代码实现了向量计算。现在我们来看到底怎么运用它,有什么实际的应用场景。
三角形扫描绘制算法
这边的三角形绘制不是只画三条线,而是指三角形的像素绘制。所以我们需要解决如何确定三角形所覆盖的像素。步骤为:
1. 确定扫描区域。如图 2 所示,我们选用三角形顶点最小和最大的 x、y 坐标,必然是包括三角形所在区域的。
2. 扫描遍历每个像素,检查它是否位于三角形内部。
3. 在三角形内部的像素进行着色。
如何判断某个点是否在三角形区域内,我们可以计算 \(\overrightarrow{PA}\times\overrightarrow{PB}\)、\(\overrightarrow{PB}\times\overrightarrow{PB}\)、\(\overrightarrow{PB}\times\overrightarrow{PA}\) 的值。如果值符号都一致,则在三角形内,否则就在三角形外。
用叉乘进行检测很好解释,在上一节中我们已经了解到叉乘的正负性就是对应的角度。三角形的内角小于 180 度,所以无论顺时针遍历各个向量,还是逆时针,如果点在三角形内,扫过的角都是内角;而在三角形外,就会出现大于 180 的情况。
三角形重心插值算法
我们已经解决像素点的问题了,现在我们解决着色问题:我们只指定了三角形三个顶点的颜色,三角形内部点的颜色怎么渐变合理。
可以使用三角形重心插值算法算出针对点的权重,然后将这个权重作用到颜色上。三角形重心插值可以这么推导,我们将 \(\overrightarrow{AP}\) 用 \(\overrightarrow{AB}\) 和 \(\overrightarrow{AC}\) 表示,即换一个坐标系表示。
\(\overrightarrow{AP}=a \overrightarrow{AB} + b \overrightarrow{AC}\),
\(P=(1-a-b)A+aB+bC\)
我们可以重新整理成书籍上给出的形式:
\(P=\alpha A + \beta B + \gamma C\),其中 \(\alpha + \beta + \gamma = 1\)
求两个变量,x 和 y 分量对应两条方程,可以直接算出各个系数的值。
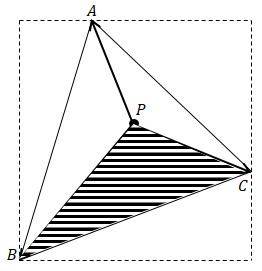
我们手算出的值,会发现是叉乘的形式。二维叉乘的几何意义对应三角形的面积(的一半)。转化成几何意义,我们会发现
\(\alpha = \frac{S_{\text{PBC}}}{S_{\text{ABC}}}\)
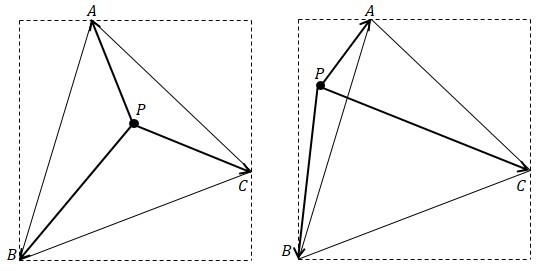
\(\beta\) 和 \(\gamma\) 类似,都是顶点对应边和 P 点组成的小三角形和大三角形的比值。如图 3 所示,这是符合直觉的,P 点离 A 点越近,A 的权重就越大,组成的小三角形 PBC 面积就越大;而且三个小三角形加起来的面积就是大三角形的面积(\(\alpha + \beta + \gamma = 1\))。
方程算出的结果,可能和你试着用一组叉乘算出来的形式写着不一样。
1. 因为叉乘是带正负性的,算面积要取绝对值。所以可能在符号上有差异。
2. 算面积取的两条边不是唯一的。虽然形式看着不一样,但只要继续全部展开,可以发现结果是一样的。
展开可能会有点乱,可以写成行列式,然后按照行列式的性质展开,结果会看着非常清晰。
4. 三角形绘制的代码实现
最后,我们实现三角形绘制的代码。对应的完整实现,记录在 tag/draw_triangle。
如代码清单 4.1 所示,第 4 至 7 行计算三角形覆盖范围,然后按照这个范围进行遍历。area 变量是三角形 ABC 的面积。接着第 20 至 26 行计算三个叉积,以此判断点是否在三角形内部。这三个叉积可以“复用”,正好可以用来算三角形面积,从而得到三角形重心的权重(第 31 行)。
- void TRasterizer::DrawTriangle(const tmath::Point2i& p1, const tmath::Point2i& p2, const tmath::Point2i& p3,
- TRGB888 color1, TRGB888 color2, TRGB888 color3)
- {
- int minX = std::min(p1.x(), std::min(p2.x(), p3.x()));
- int maxX = std::max(p1.x(), std::max(p2.x(), p3.x()));
- int minY = std::min(p1.y(), std::min(p2.y(), p3.y()));
- int maxY = std::max(p1.y(), std::max(p2.y(), p3.y()));
- tmath::Vec2i p, pp1, pp2, pp3;
- int c1, c2, c3;
- float area = (float)std::abs(tmath::cross(p2 - p1, p3 - p1));
- for (int i = minX; i <= maxX; i++)
- {
- p.x() = i;
- for (int j = minY; j <= maxY; j++)
- {
- p.y() = j;
- pp1.x() = p1.x() - p.x(); pp1.y() = p1.y() - p.y(); // pp1 = p1 - p;
- pp2.x() = p2.x() - p.x(); pp2.y() = p2.y() - p.y(); // pp2 = p2 - p;
- pp3.x() = p3.x() - p.x(); pp3.y() = p3.y() - p.y(); // pp3 = p3 - p;
- c1 = tmath::cross(pp1, pp2);
- c2 = tmath::cross(pp2, pp3);
- c3 = tmath::cross(pp3, pp1);
- if ((c1 > 0 && c2 > 0 && c3 > 0) ||
- (c1 < 0 && c2 < 0 && c3 < 0))
- {
- TRGB888 color = TRGB888::Interpolate(
- color1, std::abs(c2) / area,
- color2, std::abs(c3) / area,
- color3, std::abs(c1) / area);
- SetPixel(i, j, color);
- }
- }
- }
- }
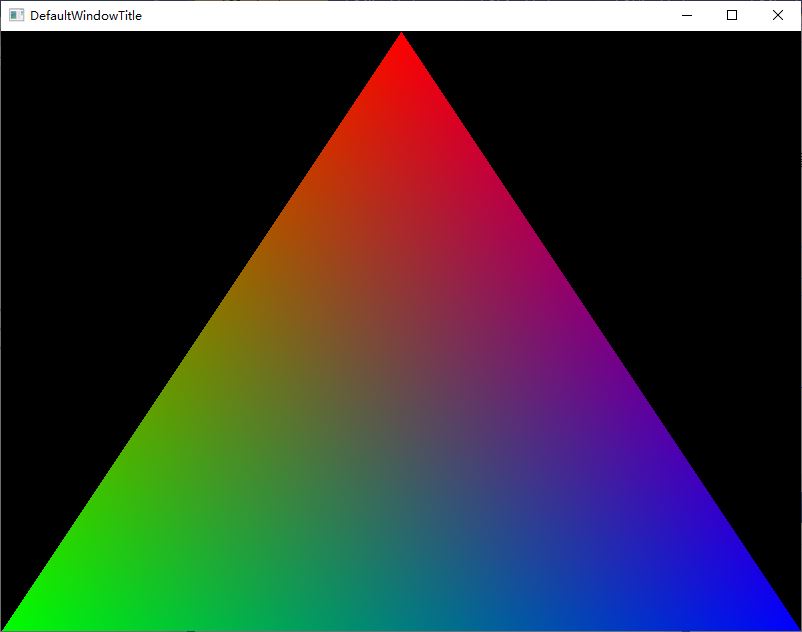
代码清单 4.2 是测试代码,三角形的三个顶点分别设置为红绿蓝。最终的效果如图 4 所示。
- void TColorfulTriangleRenderTask::Render(TRasterizer& rz)
- {
- int centerX = rz.GetWidth() / 2;
- int centerY = rz.GetHeight() / 2;
- rz.Clear(TRGB888(0, 0, 0));
- rz.DrawTriangle({ centerX, 0 }, { 0, rz.GetHeight() }, { rz.GetWidth(), rz.GetHeight() },
- TRGB888(255, 0, 0), TRGB888(0, 255, 0), TRGB888(0, 0, 255));
- }