
理解扩散模型理论
本章将深入探讨扩散模型背后的理论,并了解其内部工作原理。神经网络模型是如何生成如此逼真的图像的?好奇的我们希望揭开其神秘面纱,一窥其内部运作。
我们将触及扩散模型的基础,旨在弄清其内部工作机制,并为下一章实现可用的流程奠定基础。
通过理解扩散模型的复杂性,我们不仅可以加深对高级稳定扩散模型(也称为潜变量扩散模型,LDM)的理解,还能更有效地浏览 Diffusers 包的源代码。
这种知识将使我们能够根据新兴需求扩展该包的功能。
具体来说,我们将探讨以下主题:
• 理解图像到噪声的过程
• 更高效的前向扩散过程
• 噪声到图像的训练过程
• 噪声到图像的采样过程
• 理解分类器引导去噪过程
到本章结束时,我们将深入了解由 Jonathan Ho 等人提出的扩散模型的内部工作原理。我们将理解扩散模型的基本思想,并学习前向扩散过程。同时,我们还将掌握用于扩散模型训练和采样的反向扩散过程,并学习如何实现文本引导的扩散模型。
让我们开始吧。
理解图像到噪声的过程
扩散模型的思想来源于热力学中的扩散概念。将一幅图像比作一杯水,向图像(水)中加入足够的噪声(墨水),最终将图像(水)变成完全的噪声图像(墨水水)。
如图 4.1 所示,图像
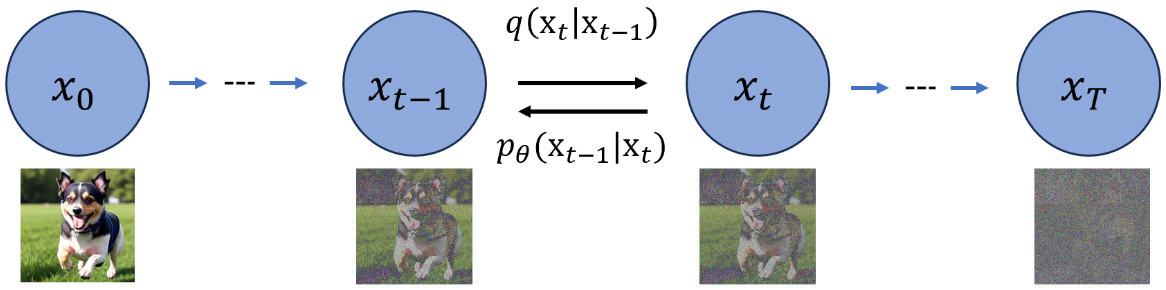
我们采用一个预定义的正向扩散过程,用
正向扩散过程的一步可以表示如下:
让我从左到右逐步解释这个公式:
• 符号
• 公式中使用定义符号
• 那么为什么这里使用
• 在右侧,分号之前的
•
• 为什么公式中使用大写
用 Python 向图像添加高斯噪声非常简单:
- import numpy as np
- import matplotlib.pyplot as plt
- import ipyplot
- from PIL import Image
- # 加载图像
- img_path = r"dog.png"
- image = plt.imread(img_path)
- # 参数设置
- num_iterations = 16
- beta = 0.1 # 噪声方差
- images = []
- steps = ["Step:" + str(i) for i in range(num_iterations)]
- # 正向扩散过程
- for i in range(num_iterations):
- mean = np.sqrt(1 - beta) * image
- image = np.random.normal(mean, beta, image.shape)
- # 将图像转换为 PIL 图像对象
- pil_image = Image.fromarray((image * 255).astype('uint8'), 'RGB')
- # 添加到图像列表中
- images.append(pil_image)
- ipyplot.plot_images(images, labels=steps, img_width=120)
图像以网格形式绘制,如图 2 所示。
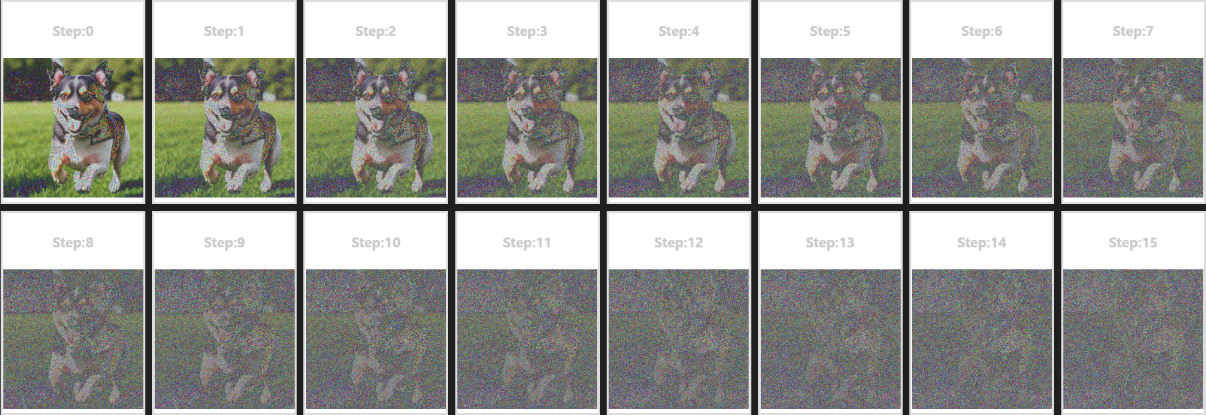
从结果可以看出,尽管每一幅图像都来自一个正态分布函数,但并非每一幅图像都是一个完全的高斯分布,更严格来说,并非一个各向同性高斯分布。只有在将步数设为无限大时,图像才会成为一个完全的高斯分布。但这并不必要。在原始的 DDPM 论文中,步数被设定为 1000,而在后来的 Stable Diffusion 中,步数减少到 20 至 50 之间。
如果图 2 的最后一张图像是一个各向同性高斯分布,其二维分布的可视化将呈现为一个圆形;其特点是所有维度上的方差相等。换句话说,分布的扩展或宽度在所有轴上是相同的。
让我们绘制添加了 16 倍高斯噪声后的图像像素分布:
- sample_img = image # 取扩散过程中的最后一幅图像
- plt.scatter(sample_img[:, 0], sample_img[:, 1], alpha=0.5)
- plt.title("2D Isotropic Gaussian Distribution")
- plt.xlabel("X")
- plt.ylabel("Y")
- plt.axis("equal")
- plt.show()
结果如图 3 所示。
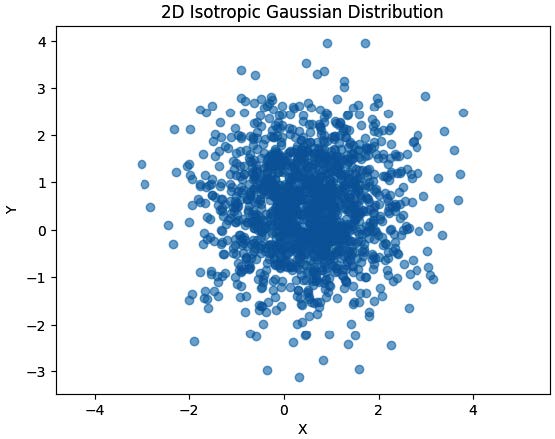
该图展示了代码如何通过仅 16 步高效地将一幅图像转化为接近各向同性、正态分布的噪声图像,正如图 2 的最后一幅图像所示。
一个更高效的正向扩散过程
如果我们使用链式过程在第
假设我们有一个均值为
那么,我们可以将该分布重写为:
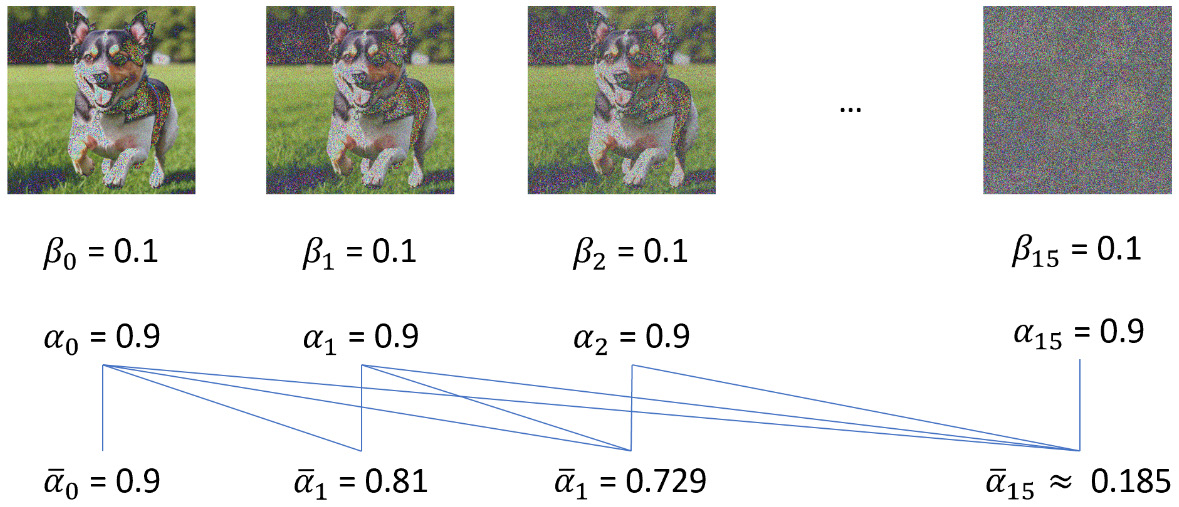
这个技巧带来的好处是,我们现在可以通过一步计算在任意步骤生成图像,从而大大提升训练性能:
现在,假设我们定义如下:
那么:
这里没有任何“魔法”,定义
那么
在图 4.4 中,我们有相同的
以下代码可以在任何步骤生成有噪声的图像:
- import numpy as np
- import matplotlib.pyplot as plt
- from PIL import Image
- from itertools import accumulate
- def get_product_accumulate(numbers):
- product_list = list(accumulate(numbers, lambda x, y: x * y))
- return product_list
- # 加载图像
- img_path = r"dog.png"
- image = plt.imread(img_path)
- image = image * 2 - 1 # [0,1] 转换为 [-1,1]
- # 参数
- num_iterations = 16
- beta = 0.05 # 噪声方差
- betas = [beta]*num_iterations
- alpha_list = [1 - beta for beta in betas]
- alpha_bar_list = get_product_accumulate(alpha_list)
- target_index = 5
- x_target = (
- np.sqrt(alpha_bar_list[target_index]) * image
- + np.sqrt(1 - alpha_bar_list[target_index]) *
- np.random.normal(0,1,image.shape)
- )
- x_target = (x_target+1)/2
- x_target = Image.fromarray((x_target * 255).astype('uint8'), 'RGB')
- display(x_target)
这段代码是之前展示的数学公式的实现。我在这里展示代码是为了帮助建立数学公式与实际实现之间的关联。如果你熟悉 Python,你可能会发现这段代码使得理解其中的细微差别变得更加容易。这段代码可以生成如图 5 所示的有噪声的图像。
现在,让我们思考如何利用神经网络恢复图像。
噪声到图像的训练过程
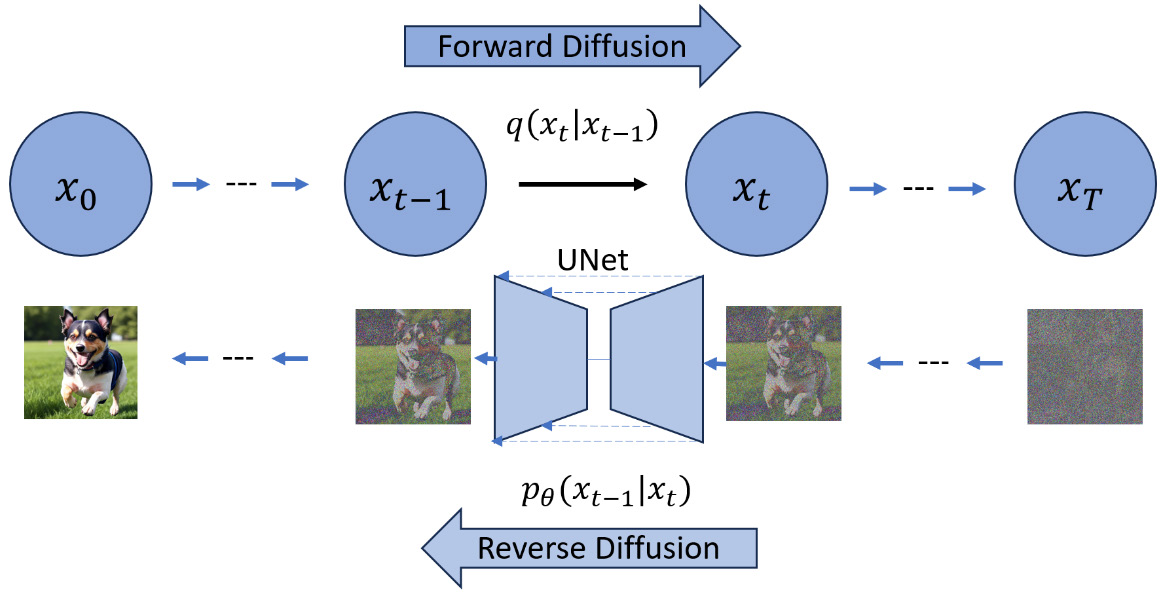
我们已经有了将噪声添加到图像中的解决方案,这被称为正向扩散,如图 6 所示。为了从噪声中恢复图像,或进行反向扩散,如图 6 所示,我们需要找到一种方法来实现反向步骤
考虑到我们手中有最终的高斯噪声数据,以及所有这些噪声步骤数据。如果我们能训练一个神经网络来逆转这个过程呢?我们可以使用神经网络来提供噪声图像的均值和方差,然后从之前的图像数据中去除生成的噪声。通过这样做,我们应该能够使用这个步骤来表示
你可能会问,我们应该如何计算损失并更新权重。最终的图像
DDPM 论文提供了一种简化的损失计算方法:
由于
UNet 将接收一个加噪声的图像数据
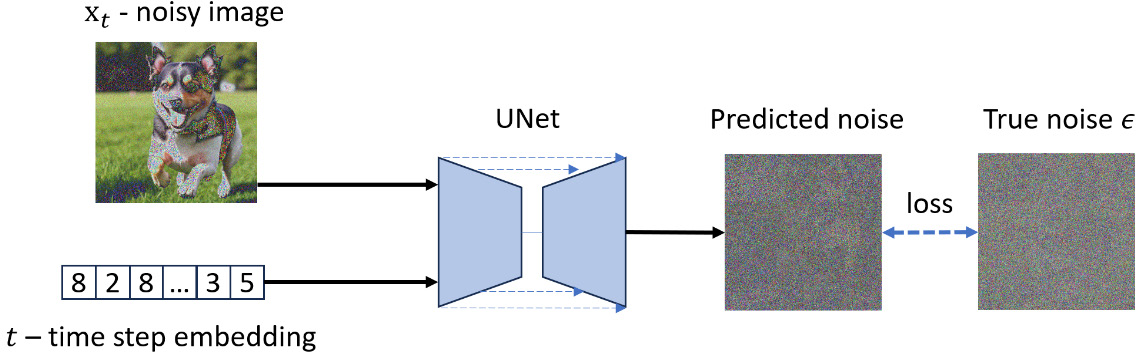
当我们说让我们训练一个神经网络来预测将从图像中去除的噪声分布,从而得到更清晰的图像时,神经网络到底在预测什么?在 DDPM 论文中,原始的扩散模型使用了一个固定的方差
在 PyTorch 的实现中,损失数据可以像这样计算:
- import torch
- import torch.nn as nn
- # 代码准备模型对象、图像和时间步
- # ...
- # 噪声是从 \( \epsilon \sim N(0, 1) \) 采样,形状与图像 \( x_t \) 相同
- noise = torch.randn_like(x_t)
- # \( x_t \) 是第 "t" 步的加噪图像,时间步值也在一起传入
- predicted_noise = model(x_t, time_step)
- loss = nn.MSELoss(noise, predicted_noise)
- # 反向传播更新权重
- # ...
噪声到图像的采样过程
以下是从模型采样图像的步骤,换句话说,这是从反向扩散过程生成图像的步骤:
1. 生成一个完整的高斯噪声,均值为 0,方差为 1:
我们将使用这个噪声作为起始图像。
2. 从
如果
然后,从 UNet 模型生成噪声,并从输入的噪声图像
如果我们看看上述公式,所有的
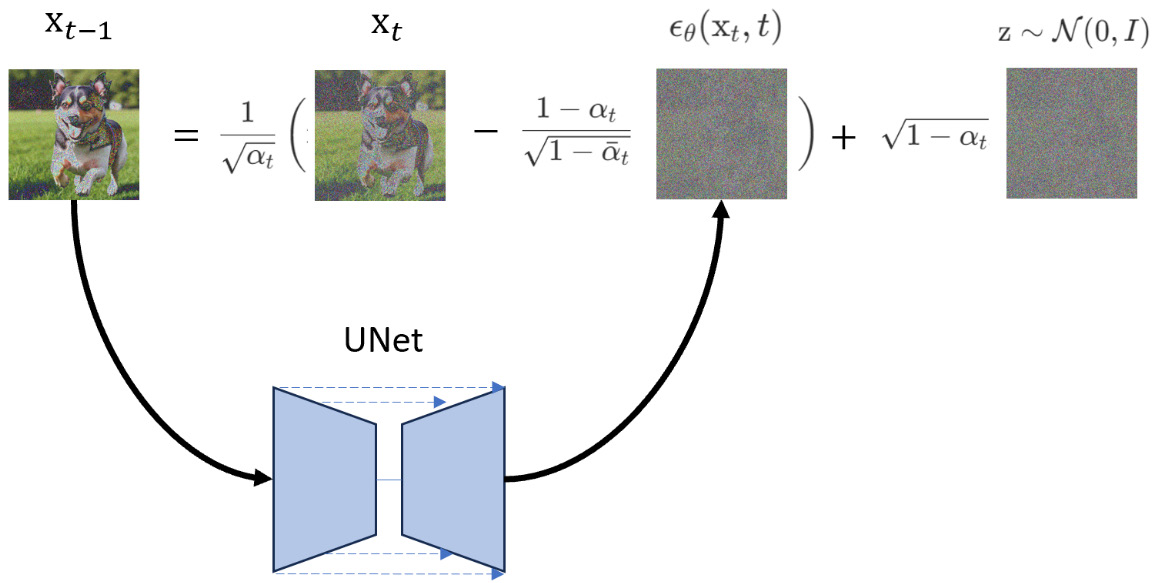
加入的
3. 循环结束,返回最终生成的图像
接下来,我们将讨论图像生成的引导。
理解分类器引导去噪
到目前为止,我们还没有讨论文本引导。在没有引导的情况下,图像生成过程仅使用随机高斯噪声作为输入,然后根据训练数据集随机生成一张图像。但我们希望有一个引导的图像生成过程;例如,输入“dog”来要求扩散模型生成一张包含“dog”的图像。
在2021年,OpenAI的Dhariwal和Nichol在他们的论文《Diffusion Models Beat GANs on Image Synthesis》中提出了分类器引导方法。
根据该方法,我们可以通过在训练阶段提供分类标签来实现分类器引导的去噪。除了图像或时间步嵌入,我们还提供文本描述的嵌入,如图 9 所示。
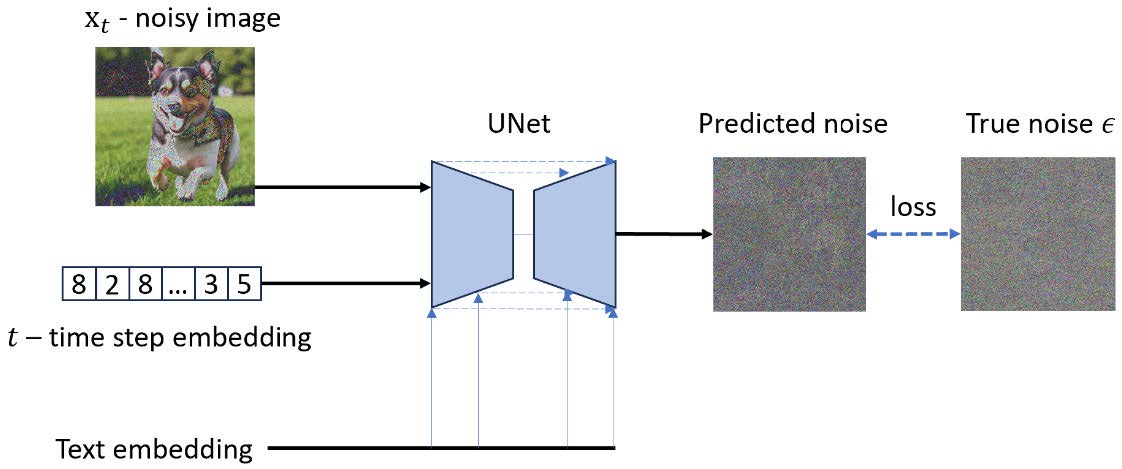
在图 7 中,有两个输入,而在图 9 中,增加了一个输入——文本嵌入。它是由 OpenAI 的 CLIP 模型生成的嵌入数据。我们将在下一章讨论更强大的 CLIP 模型引导的扩散模型。
总结
在这一章中,我们深入探讨了最初由 Jonathan Ho 等人提出的扩散模型的内部工作原理。我们了解了扩散模型的基础思想,并学习了正向扩散过程。我们还讨论了扩散模型训练和采样中的反向扩散过程,并探索了如何使文本引导的扩散模型成为可能。通过本章内容,我们旨在解释扩散模型的核心思想。如果你想自己实现一个扩散模型,我建议直接阅读原始的 DDPM 论文。
DDPM 扩散模型能够生成逼真的图像,但它的一个问题是性能。模型训练不仅慢,图像采样的速度也很慢。在下一章中,我们将讨论稳定扩散模型,它以一种巧妙的方式提高了速度。